Samples
Hello world
The obligatory example: prints out a ‘Hello world’ message. The model (‘hello.slacm’) is shown below.
app HelloApp:
message Msg
component HelloTest:
timer clock 1000
actor HelloActor:
local Msg
theHello : HelloTest
The implementation of our single component (‘HelloTest.py’) is shown below.
from slacm.component import Component
class HelloTest(Component):
def __init__(self):
super().__init__()
def on_clock(self):
now = self.clock.recv_pyobj()
self.logger.info('on_clock(): %s - Hello world!', str(now))
Hello world, second edition
app HelloApp:
message Msg
component Hello2Pub:
timer clock 1000
pub port : Msg
component Hello2Sub:
sub port : Msg
actor HelloActor:
local Msg
thePub : Hello2Pub
theSub : Hello2Sub
The publisher (`Hello2Pub.py’):
from slacm.component import Component
class Hello2Pub(Component):
def __init__(self, arg1,arg2=None):
super().__init__()
self.logger.info('-(%r,%r)' % (arg1,arg2))
self.cnt = 0
def on_clock(self):
now = self.clock.recv_pyobj()
self.logger.info('on_clock(): %s', str(now))
msg = "msg" + str(self.cnt)
self.cnt += 1
self.port.send_pyobj(msg)
self.logger.info("send: %s" % msg)
The subscriber (‘Hello2Sub.py’):
from slacm.component import Component
class Hello2Sub(Component):
def __init__(self, arg3, arg4):
super().__init__()
self.logger.info('-(%r,%r)' % (arg3,arg4))
def on_port(self):
msg = self.port.recv_pyobj()
self.logger.info('on_port(): recv = %s', msg)
The parameter file for the applicaion (‘hello2.params’):
root:
HelloActor:
thePub:
arg1: "this is arg1"
# arg2: use default for this one
theSub:
arg3: dir/file
arg4: 1.23456
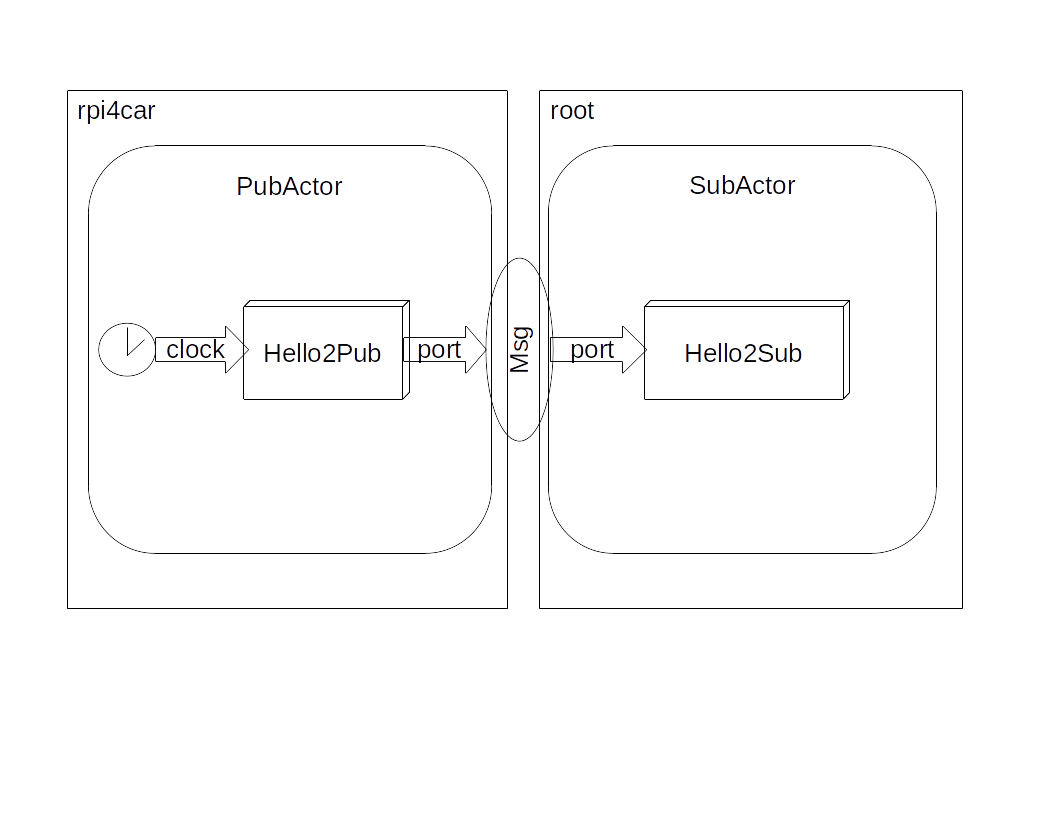
Hello world, second edition distributed
app HelloApp:
message Msg
component Hello2Pub:
timer clock 1000
pub port : Msg
component Hello2Sub:
sub port : Msg
actor PubActor:
thePub : Hello2Pub
actor SubActor:
theSub : Hello2Sub
// Distributed version
host (rpi4car) PubActor
host root SubActor
The parameter file:
# root + rpi4car version
rpi4car:
PubActor:
thePub:
arg1: "this is arg1"
# arg2: use default for this one
root:
SubActor:
theSub:
arg3: dir/file
arg4: 1.23456
The architecture of the application is shown below.
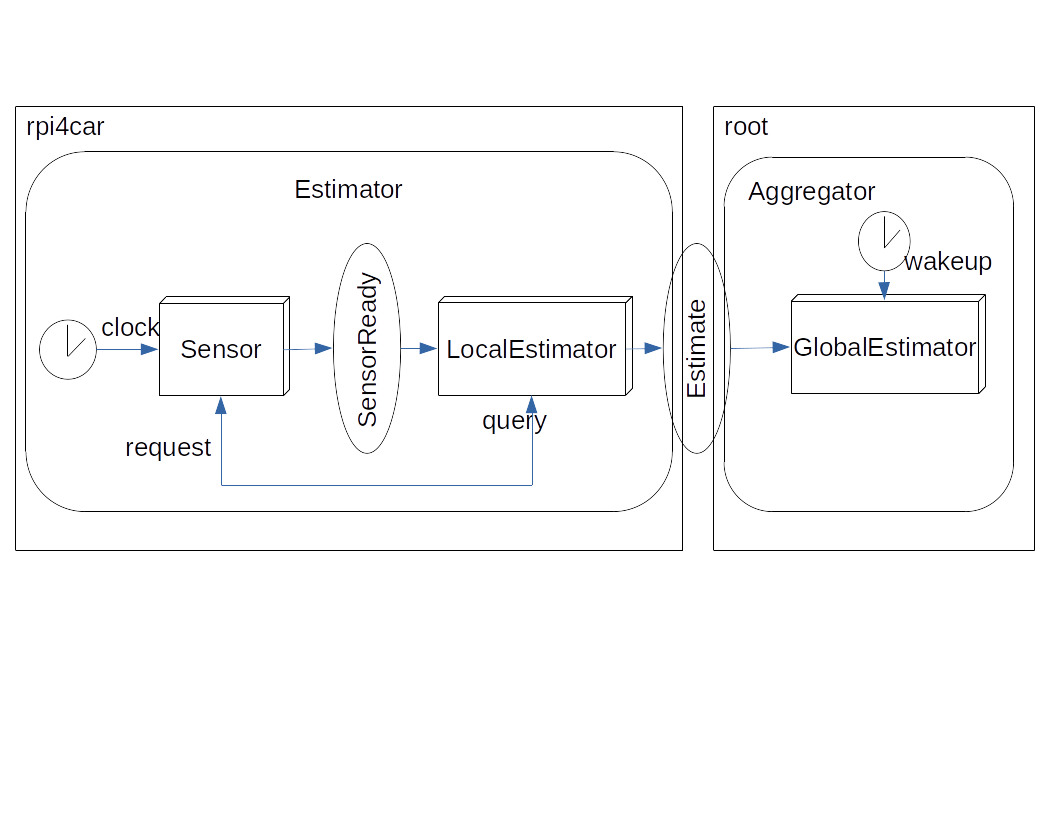
Distributed estimator
The application collects data from multiple sensors, the data is filtered by a (local) estimator, and send to a (global) aggregator. The sensors send a notification message to their estimator, which then queries that data. Typically sensor/estimator pairs are deployed on several hosts, while a single host runs the aggregator. Here we use one hosts (rpi4car) for a sensor estimator, and the root host for the aggregator.
Application model:
app DistributedEstimator:
// Message types used in the app
message SensorReady
message SensorQuery
message SensorValue
message Estimate
// Sensor component
component Sensor:
timer clock 1000 // Periodic timer trigger to trigger sensor every 1 sec
pub ready : SensorReady // Publish port for SensorReady messages
rep request : ( SensorQuery , SensorValue ) // Reply port to query the sensor and retrieve its value
// Local estimator component
component LocalEstimator:
sub ready : SensorReady // Subscriber port to trigger component with SensorReady messages
req query : (SensorQuery , SensorValue ) // Request port to query the sensor and retrieve its value
pub estimate : Estimate // Publish port to publish estimated value messages
// Global estimator
component GlobalEstimator:
sub estimate : Estimate // Subscriber port to receive the local estimates
timer wakeup 3000 // Periodic timer to wake up estimator every 3 sec
// Estimator actor
actor Estimator:
local SensorReady, SensorQuery, SensorValue // Local message types
// Sensor component
sensor : Sensor
// Local estimator, publishes global message 'Estimate'
filter : LocalEstimator
actor Aggregator:
// Global estimator, subscribes to 'Estimate' messages
aggr : GlobalEstimator
// Distributed version
host (rpi4car) Estimator
host root Aggregator
Sensor.py:
from slacm.component import Component
class Sensor(Component):
def __init__(self):
super().__init__()
self.logger.info("Sensor()")
def on_clock(self):
now = self.clock.recv_pyobj() # Receive time.time() as float
self.logger.info('on_clock(): %s' % str(now))
msg = "data_ready"
self.ready.send_pyobj(msg)
def on_request(self):
req = self.request.recv_pyobj()
self.logger.info("on_request():%s" % req)
rep = "sensor_rep"
self.request.send_pyobj(rep)
LocalEstimator.py:
import os
from slacm.component import Component
class LocalEstimator(Component):
def __init__(self):
super().__init__()
self.pid = os.getpid()
self.pending = 0
self.logger.info("LocalEstimator")
def on_ready(self):
msg = self.ready.recv_pyobj()
self.logger.info("on_ready():%s [%d]" % (msg, self.pid))
while self.pending > 0: # Handle the case when there is a pending request
self.on_query()
msg = "sensor_query"
if self.query.send_pyobj(msg):
self.pending += 1
def on_query(self):
msg = self.query.recv_pyobj()
self.logger.info("on_query():%s" % msg)
self.pending -= 1
msg = "local_est(" + str(self.pid) + ")"
self.estimate.send_pyobj(msg)
GlobalEstimator.py:
from slacm.component import Component
class GlobalEstimator(Component):
def __init__(self):
super().__init__()
self.logger.info("GlobalEstimator()")
def on_wakeup(self):
msg = self.wakeup.recv_pyobj()
self.logger.info("on_wakeup():%s" % msg)
def on_estimate(self):
msg = self.estimate.recv_pyobj()
self.logger.info("on_estimate():%s" % msg)
Note the use of the pending counter in the LocalEstimator: this ensures that the sender will process all
responses before sending a next one.
The architecture of the application is shown below.
Use of the query/answer ports
Application model:
app HelloApp:
message MsgReq
message MsgRep
component HelloQuery:
timer clock 1000
qry port : (MsgReq,MsgRep)
component HelloAnswer:
ans port : (MsgReq,MsgRep)
actor HelloActor:
local MsgReq, MsgRep
theQry1: HelloQuery
theQry2: HelloQuery
theAns: HelloAnswer
The application runs two HelloQuery components that send messages to the HelloAnswer server.
HelloQuery.py:
from slacm.component import Component
class HelloQuery(Component):
def __init__(self):
super().__init__()
self.id = id(self)
self.cnt = 0
def on_clock(self):
now = self.clock.recv_pyobj()
self.logger.info('[%d]on_clock(): %s', self.id, str(now))
msg = "msg.%d.%d" % (self.id, self.cnt)
self.cnt += 1
self.port.send_pyobj(msg)
self.logger.info("[%d]send: %s", self.id, msg)
def on_port(self):
rsp = self.port.recv_pyobj()
self.logger.info("[%d]recv: %s", self.id, rsp)
The server queues up the requests and responds to them, in the order of arrival, after there is at least one more request.
HelloAnswer.py:
from slacm.component import Component
class HelloAnswer(Component):
def __init__(self):
super().__init__()
self.queue = [] # Queue for storing messages
def on_port(self):
msg = self.port.recv_pyobj()
self.logger.info('on_port(): recv = %s', msg)
recent = (self.port.get_identity(),msg) # The message comes with the sender's identity
if len(self.queue) > 0: # If we have something in queue
(identity,message) = self.queue.pop(0) # ... take it out
self.port.set_identity(identity) # ... and send it back to its sender
self.port.send_pyobj(message)
self.queue.append(recent) # Append most recent message to queue
Note that use of the get_identity and set_identity operations. This ensures that the response goes back to the right
client.